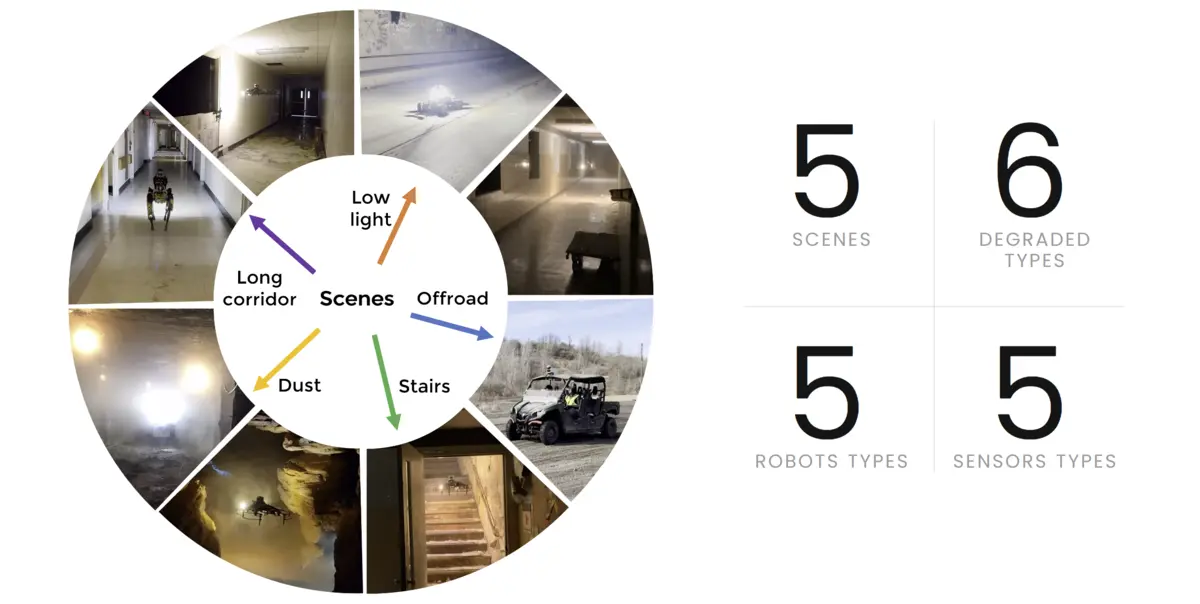
SubT-MRS Dataset
Zhao et al., "SubT-MRS Dataset: Pushing SLAM Towards All-weather Environments," CVPR 2024.
@InProceedings{Zhao_2024_CVPR,
author = {Zhao, Shibo and Gao, Yuanjun and Wu, Tianhao and
Singh, Damanpreet and Jiang, Rushan and Sun, Haoxiang and
Sarawata, Mansi and Qiu, Yuheng and Whittaker, Warren and
Higgins, Ian and Du, Yi and Su, Shaoshu and Xu, Can and
Keller, John and Karhade, Jay and Nogueira, Lucas and
Saha, Sourojit and Zhang, Ji and Wang, Wenshan and
Wang, Chen and Scherer, Sebastian},
title = {SubT-MRS Dataset: Pushing SLAM Towards All-weather Environments},
booktitle = {CVPR},
year = {2024},
pages = {22647--22657}
}