Content
TARTAN IMU: A Light Foundation Model
for Inertial Positioning in Robotics
Results (Foundation Model Performance on Different Robot Platform)
UGV (Foundation Model)
Quadruped (Foundation Model)
Drone (Foundation Model)
Human (Foundation Model)




About TartanIMU
Despite recent advances in deep learning, most existing learning IMU odometry methods are trained on specific datasets, lack generalization, and are prone to overfitting, which limits their real-world application. To address these challenges, we present Tartan IMU, a foundation model designed for generalizable, IMU-based state estimation across diverse robotic platforms.
Our approach consists of three stages: First, a pre-trained foundation model leverages over 100 hours of multi-platform data to establish general motion knowledge, achieving 36% improvement in ATE over specialized models. Second, to adapt to previously unseen tasks, we use Low-Rank Adaptation (LoRA), allowing positive transfer with only 1.1 M trainable parameters. Finally, to support robotics deployment, we introduce online test-time adaptation, which eliminates the boundary between training and testing, allowing the model to continuously "learn as it operates" at 200 FPS in real-time.
Tartan IMU is to our knowledge the first open-source cross-robot foundation model for pose estimation using solely IMU data.
System Architecture
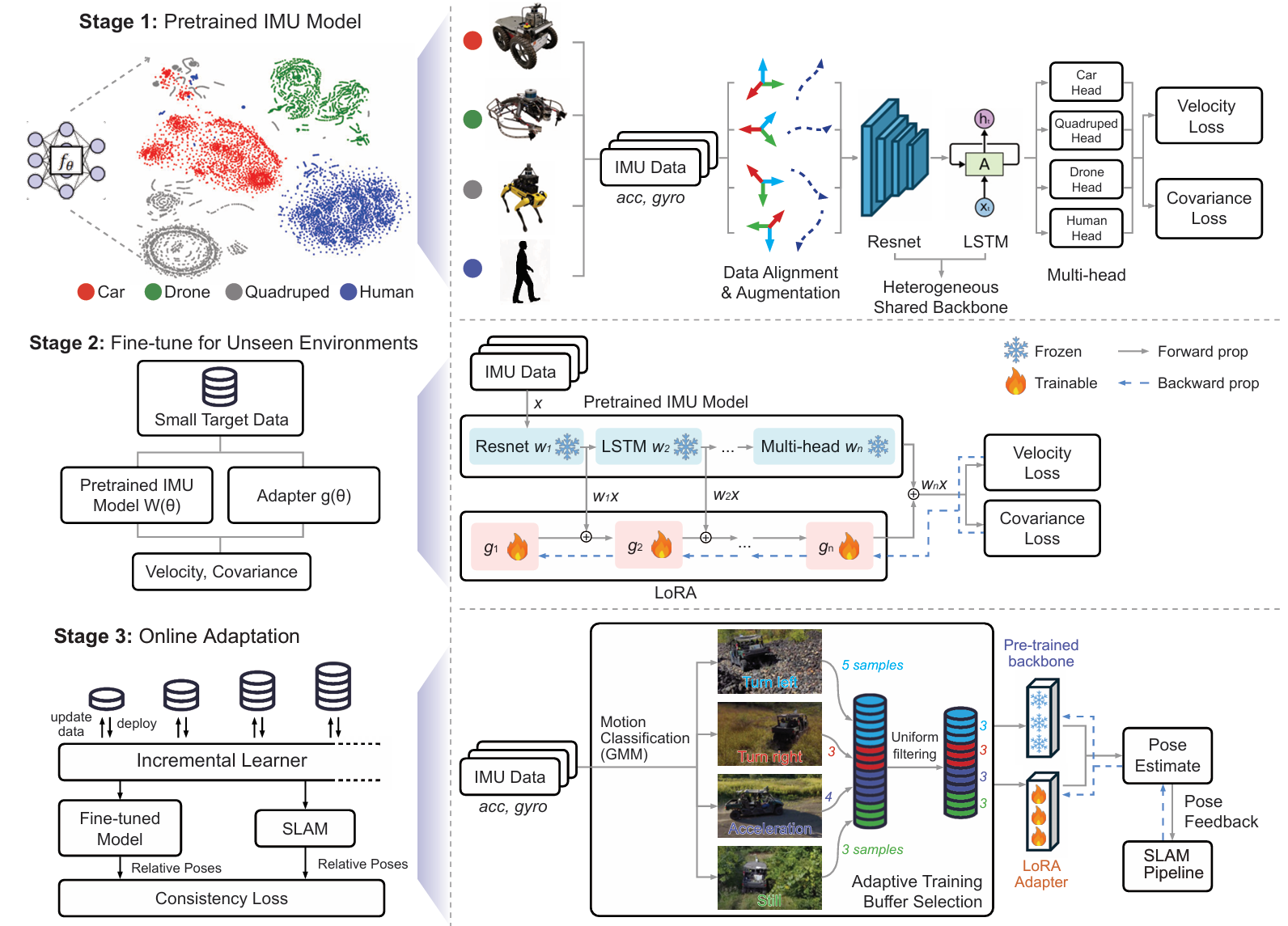
Figure 1: Three learning stages of TartanIMU. (a) Pretrained IMU Model features a shared backbone to capture generalizable IMU knowledge. (b) Efficient Fine-Tuning utilizes an adapter to enable positive transfer for new tasks. (c) Online Adaptation employs an adaptive memory buffer to support on-the-fly model updates during deployment.
Method
Our foundation model leverages a shared backbone architecture to capture generalizable IMU motion patterns across different robotic platforms. This stage establishes the core motion understanding that serves as the foundation for subsequent adaptation stages.
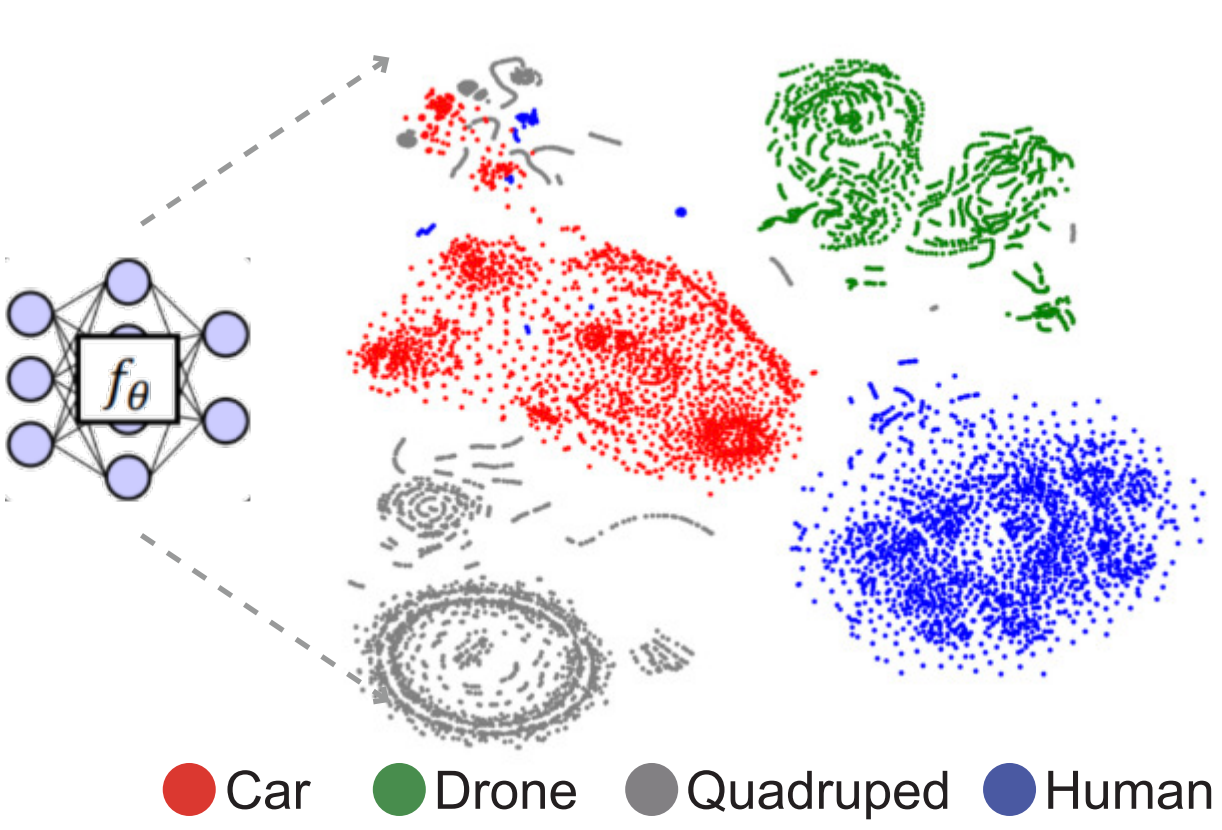
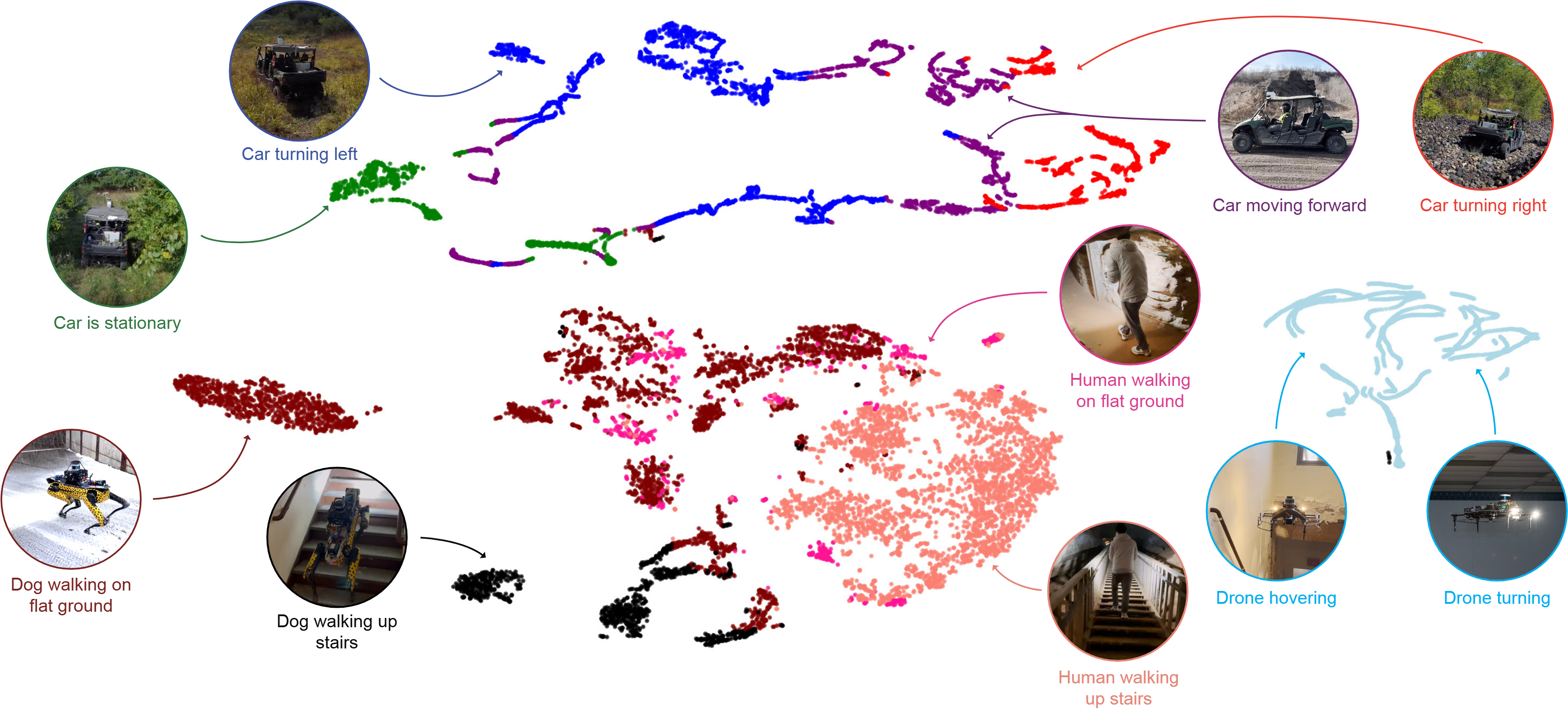
t-SNE visualization of the learned ResNet feature space. Cluster separation across platforms shows the model's ability to learn motion-specific dynamics.
Once the base TartanIMU model is pretrained, we adapt it to unseen robot motions or challenging deployment scenarios using Low-Rank Adaptation (LoRA). This technique introduces only a small number of trainable parameters while freezing the original model, preserving its robust general motion understanding.
LoRA achieves this by reparameterizing weight updates as a low-rank matrix decomposition:
Here, \(W_0\) is the pretrained weight, and \(A, B\) are the small matrices trained for the new task. This structure ensures that learning is efficient, allowing use even with very limited data.

Our LoRA-based finetuning improves accuracy on new motion tasks while keeping computational and data costs low.
One of the key benefits of LoRA adaptation is non-forgetting: the core representation remains stable across tasks. This enables lifelong learning capabilities and is particularly useful in robotics where new environments and tasks are continuously encountered.
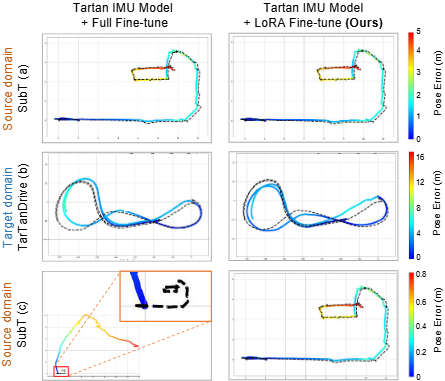
Comparison of LoRA vs. full fine-tuning. LoRA retains prior knowledge, while full finetuning can degrade earlier performance.
In the final stage of our TartanIMU pipeline, we enable real-time test-time adaptation through a novel online learning strategy. Unlike traditional pipelines that maintain a static model during deployment, we allow the model to evolve as it operates. This is critical in real-world robotics, where domain shifts such as speed, terrain, or motion patterns frequently occur.
To support this, we maintain a lightweight, adaptive training buffer that stores recent IMU samples during deployment. These samples are filtered and clustered via a Gaussian Mixture Model (GMM) based motion classifier to ensure diversity across motion types—e.g., stationary, forward motion, left turns, and right turns. The buffer actively reselects samples to avoid redundancy, enabling quick and stable updates with minimal compute.
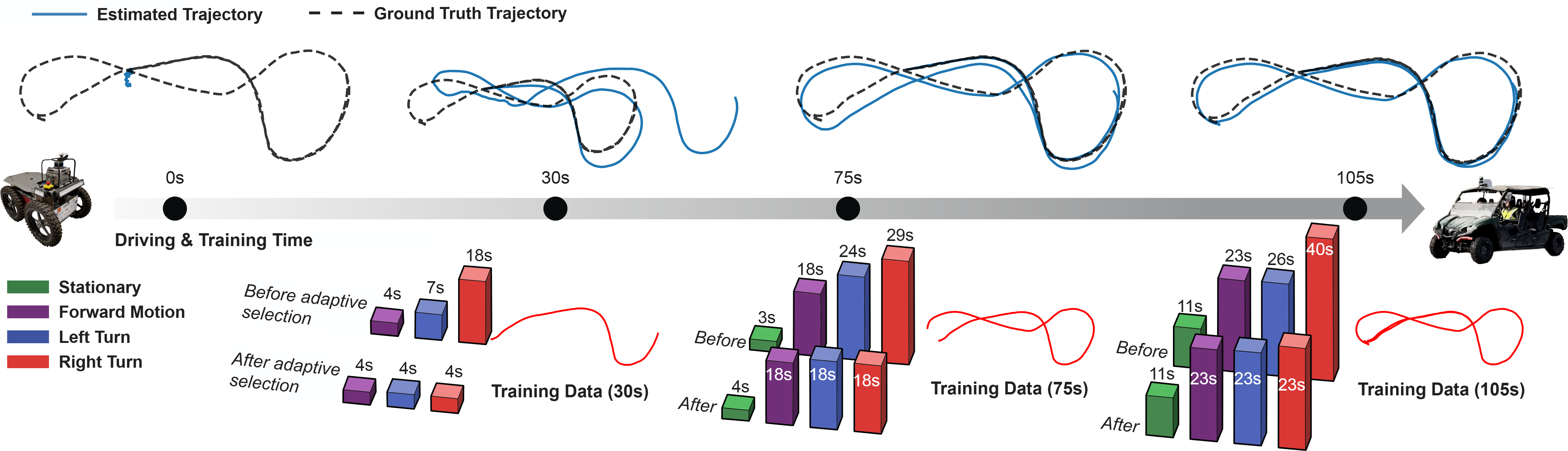
Online adaptation results in an 8-shaped trajectory using only IMU data. By maintaining a balanced buffer across diverse motion segments, TartanIMU adapts quickly during deployment, improving trajectory accuracy over time.
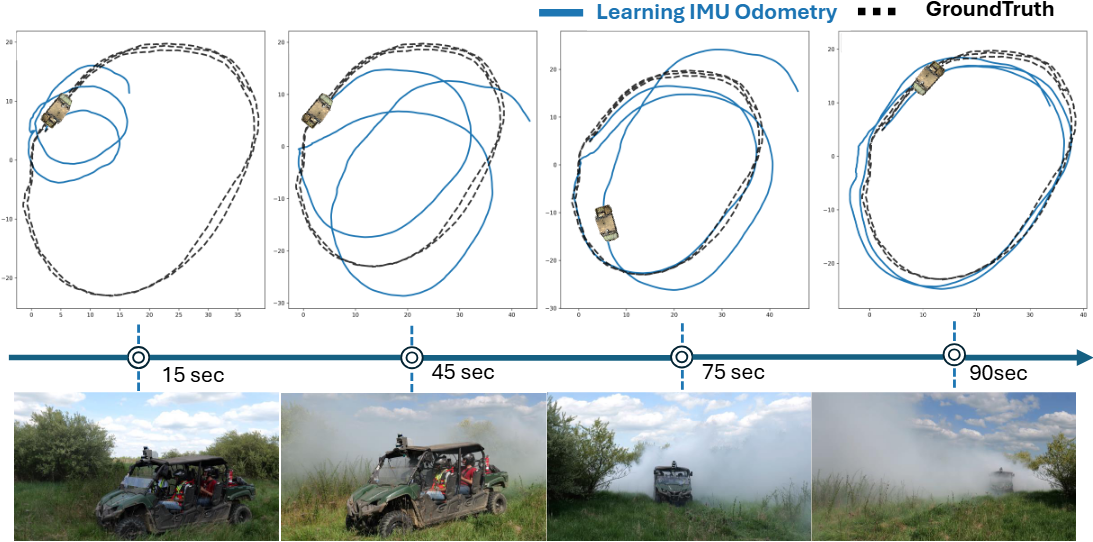
Performance of Online Adaptation on Unseen Trajectory. The Tartan IMU model progressively learns unseen circular patterns through incremental training data. It can be seen that our model can learn new motion patterns within 90 seconds.
Interactive Demo (Coming Soon)
Try TartanIMU with our curated sample trajectories! Select a platform and trajectory below to test with our live model on Hugging Face.
Quadruped Robot Trajectories

Spot Robot - Outdoor Exploration
Boston Dynamics Spot navigating challenging outdoor terrain with rocks and vegetation.
- Environment: Rocky outdoor terrain
- Challenges: Uneven ground, obstacles
- Data: 200Hz IMU, 120 seconds

Spot Robot - Stair Navigation
Complex stair climbing and descending with dynamic gait adjustments.
- Environment: Multi-level stairs
- Challenges: Height changes, gait adaptation
- Data: 200Hz IMU, 90 seconds
Spot Robot - Indoor Office
Precise navigation through indoor office spaces with furniture obstacles.
- Environment: Indoor office space
- Challenges: Tight spaces, furniture
- Data: 200Hz IMU, 150 seconds
Drone Flight Trajectories

Quadcopter - Indoor 3D Flight
Complex 3D maneuvers including loops, spirals, and rapid direction changes.
- Environment: Indoor flight space
- Challenges: 3D motion, rapid acceleration
- Data: 200Hz IMU, 90 seconds
Drone - Wind Disturbance
Outdoor flight in windy conditions with constant stabilization adjustments.
- Environment: Outdoor with wind
- Challenges: Wind disturbance, stability
- Data: 200Hz IMU, 180 seconds
Drone - Precision Hovering
High-precision hovering with micro-adjustments and position holding.
- Environment: Indoor controlled
- Challenges: Micro-movements, stability
- Data: 200Hz IMU, 60 seconds
Human Locomotion Trajectories
Human - Urban Sidewalk
Natural walking patterns on urban sidewalks with turns and speed changes.
- Environment: Urban sidewalk
- Challenges: Variable speed, direction changes
- Data: 200Hz IMU, 180 seconds

Human - Jogging Path
Continuous jogging with varying pace and directional changes along park paths.
- Environment: Park jogging path
- Challenges: Higher frequency motion, pace changes
- Data: 200Hz IMU, 240 seconds

Human - Building Navigation
Walking through multi-level building with stairs and corridor navigation.
- Environment: Multi-story building
- Challenges: Stairs, elevation changes
- Data: 200Hz IMU, 120 seconds
UGV Navigation Trajectories
UGV - Forest Navigation
Off-road navigation through forest trails with varying terrain and obstacles.
- Environment: Forest trail
- Challenges: Bumpy terrain, speed variation
- Data: 200Hz IMU, 200 seconds
UGV - City Navigation
Autonomous navigation through urban streets with traffic and intersections.
- Environment: Urban streets
- Challenges: Traffic, stop-and-go motion
- Data: 200Hz IMU, 300 seconds
UGV - Parking Precision
Complex parking maneuvers including parallel parking and tight turns.
- Environment: Parking lot
- Challenges: Precision maneuvers, tight spaces
- Data: 200Hz IMU, 90 seconds
Select a trajectory above to get started
Choose any platform and trajectory to see detailed information and try it with our model.
How it works
- Select a platform (Quadruped, Drone, Human, or UGV)
- Choose a specific trajectory from the available options
- Click "Try with TartanIMU Model" to launch our Hugging Face demo
- The selected trajectory data will be automatically loaded
- See real-time pose estimation results and compare with ground truth
Upload your own data
Want to test with your own IMU data? Our Hugging Face demo also supports custom NPZ file uploads.
Required format: NPZ file containing IMU data at 200Hz with keys: 'acc', 'gyro', 'timestamp'
Open Hugging Face DemoDataset (Release Soon)
The TartanIMU dataset contains over 100 hours of diverse IMU data across multiple robotic platforms, environments, and motion patterns. This comprehensive collection enables robust foundation model training and evaluation.
Platform Statistics
| Platform | Robot Types | Environments | Trajectories | Total Duration | Data Rate | Download |
|---|---|---|---|---|---|---|
| Quadruped | Boston Dynamics Spot, ANYmal | Indoor, Outdoor, Stairs, Rough Terrain | 45 | 28.5 hours | 200 Hz | Hugging Face |
| Drone | DJI M100, Custom Quadcopter | Indoor Flight, Outdoor, Windy Conditions | 38 | 22.7 hours | 200 Hz | Hugging Face |
| Human | Handheld Device, Body-worn IMU | Urban Walking, Jogging, Indoor Navigation | 52 | 31.2 hours | 200 Hz | Hugging Face |
| UGV | RC Car, Autonomous Vehicle, SubT Robot | Off-road, Urban Streets, Forest Trails | 42 | 25.4 hours | 200 Hz | Hugging Face |
| Total | 12 Robot Types | 15+ Environments | 177 | 107.8 hours | 200 Hz | Complete Dataset |
Data Format and Usage
File Format
NPZ files containing synchronized IMU data:
acc: 3D accelerometer data (m/s²)gyro: 3D gyroscope data (rad/s)timestamp: High-precision timestampspose_gt: Ground truth poses (when available)
Pre-processing
All data is:
- Temporally synchronized across platforms
- Calibrated and bias-corrected
- Resampled to consistent 200Hz
- Segmented into motion-coherent sequences
Quick Start
Load and use the data:
import numpy as np
data = np.load('trajectory.npz')
acc = data['acc'] # Shape: (N, 3)
gyro = data['gyro'] # Shape: (N, 3)
timestamps = data['timestamp']Key Features
Multi-Environment
Indoor offices, outdoor terrains, underground caves, urban streets, forest trails
Cross-Platform
Legged robots, drones, ground vehicles, handheld devices
Synchronized
Hardware-synchronized IMU data at 200Hz across all platforms
Diverse Motion
Walking, flying, driving, climbing, hovering, maneuvering
Limitations
While TartanIMU exhibits strong generalization across vehicles, drones, and legged robots, it still cannot support arbitrary robotic platforms. However, our experiments show that the car motion head generalizes well to TartanDrive and SubT vehicles. We believe our categories—car, humanoid, quadruped, and drone—encompass most robots. For unseen platforms, introducing a new motion head or leveraging a mixture of existing experts (MoE) presents a promising future direction.
Future Research Directions
We are actively working to address these limitations through:
- Multi-modal fusion: Integrating visual and LiDAR data for drift correction and scale recovery
- Adaptive learning: Developing methods for continuous learning from deployment data
- Hardware optimization: Creating efficient model variants for edge computing platforms
- Robust estimation: Improving resilience to sensor failures and environmental disturbances
- Extended datasets: Collecting data from more diverse platforms and challenging scenarios
Citation
@inproceedings{zhao2025tartan,
title={Tartan IMU: A Light Foundation Model for Inertial Positioning in Robotics},
author={Zhao, Shibo and Zhou, Sifan and Blanchard, Raphael and Qiu, Yuheng and Wang, Wenshan and Scherer, Sebastian},
booktitle={Proceedings of the Computer Vision and Pattern Recognition Conference},
pages={22520--22529},
year={2025}
}