One Unified Model
One submission must handle car, drone, quadruped, and handheld trajectories at once.
IROS 2026 Competition · Cross-Platform Inertial Positioning
Estimate 3D body-frame velocity from raw 6-axis IMU with one unified model across car, drone, quadruped, and handheld motion.
Challenge design
Training and validation data include platform labels. The anonymized test set does not, requiring a single model to generalize across radically different dynamics without switching between platform-specific experts.
One submission must handle car, drone, quadruped, and handheld trajectories at once.
Test labels and platform-revealing trajectory identifiers remain hidden from participants.
Predicted velocities are integrated, aligned with SE(3) Umeyama, and scored equally across platforms.
Reference checkpoints, training code, and a browser demo provide a reproducible starting point.
Benchmark coverage
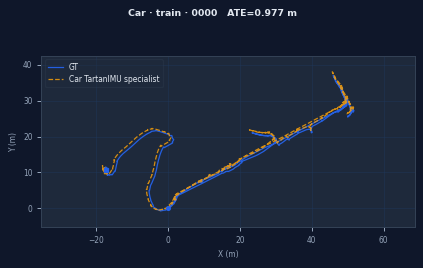
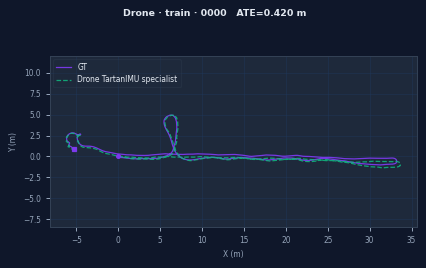
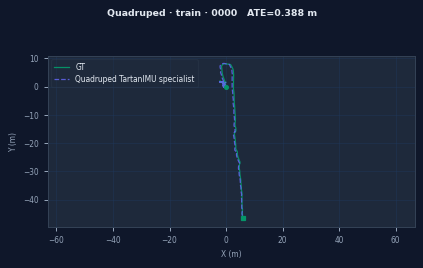
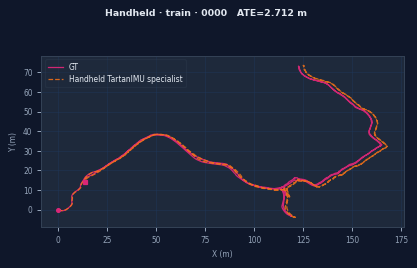
Each platform page provides split statistics, trajectory previews, sensor characteristics, and domain-specific evaluation context.
Protocol at a glance
The model interface stays compact while evaluation measures the accumulated motion that matters in deployment.
Organizers and partners
The challenge is organized by CMU AirLab and Amazon FAR in conjunction with the IROS 2026 workshop on interoceptive perception.


Announcements
The competition is live on Kaggle: TartanIMU Challenge: Multi-Platform Inertial Odometry.
The official dataset release hub is available from the challenge data page.
Platform pages for Car, Drone, Quadruped, and Handheld are published.
The initial IMU Odometry Challenge website and benchmark structure launched.
Research resources
Run the TartanIMU specialist models in the Hugging Face demo. Cite the paper and benchmark when using these resources.
@inproceedings{zhao2025tartanimu,
title={Tartan IMU: A Light Foundation Model for Inertial
Positioning in Robotics},
author={Zhao, Shibo and Yagnyatinskiy, Maxim and others},
booktitle={Proceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR)},
year={2025},
url={https://openaccess.thecvf.com/content/CVPR2025/papers/
Zhao_Tartan_IMU_A_Light_Foundation_Model_for_Inertial_
Positioning_in_CVPR_2025_paper.pdf}
}@misc{imuchallenge2026,
title={IMU Odometry Challenge: Cross-Platform Inertial
Positioning Benchmark},
author={CMU AirLab and Super Odometry Group},
year={2026},
howpublished={\url{https://superodometry.com/imuchallenge/}},
note={Dataset and benchmark challenge page}
}